实验七 EEPROM读写—硬件IIC通讯
一.实验目标
1.通过编程使用STM32的硬件IIC,控制EEPROM读写,掌握EEPROM的读写方法;
2.通过本实验掌握STM32的硬件IIC控制外设的基本概念,掌握IIC控制的基本方法。
二.知识储备及设计思路
I2C 通讯协议(Inter-Integrated Circuit)是由Phiilps 公司开发的,由于它引脚少,硬件实现简单,可扩展性强,不需要USART、CAN 等通讯协议的外部收发设备,现在被广泛地使用在系统内多个集成电路(IC)间的通讯。
下面我们分别对I2C 协议的物理层及协议层进行讲解。
\1. I2C 物理层
I2C 通讯设备之间的常用连接方式见图 6-1。
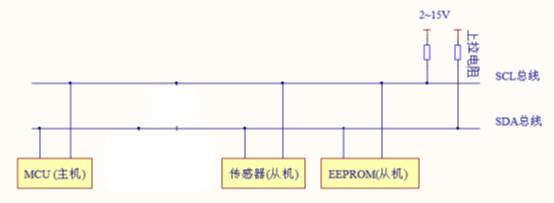
图 6-1 常见的I2C 通讯系统
它的物理层有如下特点:
(1) 它是一个支持多设备的总线。“总线”指多个设备共用的信号线。在一个I2C 通讯总线中,可连接多个I2C 通讯设备,支持多个通讯主机及多个通讯从机。
(2) 一个I2C 总线只使用两条总线线路,一条双向串行数据线(SDA) ,一条串行时钟线(SCL)。数据线即用来表示数据,时钟线用于数据收发同步。
(3) 每个连接到总线的设备都有一个独立的地址,主机可以利用这个地址进行不同设备之间的访问。
(4) 总线通过上拉电阻接到电源。当I2C 设备空闲时,会输出高阻态,而当所有设备都空闲,都输出高阻态时,由上拉电阻把总线拉成高电平。
(5) 多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定由哪个设备占用总线。
(6) 具有三种传输模式:标准模式传输速率为100kbit/s ,快速模式为400kbit/s ,高速模下可达1Mbit/s,但目前大多I2C 设备尚不支持高速模式。
(7) 连接到相同总线的 IC 数量受到总线的最大电容 400pF 限制 。
2. 协议层
I2C 的协议定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地
址广播等环节。
(1). I2C 基本读写过程
先看看I2C 通讯过程的基本结构,它的通讯过程见图 6-2、图 6-3 及图 6-4。

图 6-2 主机写数据到从机
图 6-3 主机由从机中读数据
图 6-4 I2C 通讯复合格式
(2). 通讯的起始和停止信号
前文中提到的起始(S)和停止(P)信号是两种特殊的状态,见图 6-5。当 SCL 线是高电平时 SDA 线从高电平向低电平切换,这个情况表示通讯的起始。当 SCL 是高电平时 SDA线由低电平向高电平切换,表示通讯的停止。起始和停止信号一般由主机产生。
图 6-5 起始和停止信号
(3). 数据有效性
I2C 使用SDA 信号线来传输数据,使用SCL 信号线进行数据同步。见图 6-6。SDA数据线在SCL 的每个时钟周期传输一位数据。传输时,SCL 为高电平的时候SDA 表示的数据有效,即此时的SDA 为高电平时表示数据“1”,为低电平时表示数据“0”。当SCL为低电平时,SDA 的数据无效,一般在这个时候SDA 进行电平切换,为下一次表示数据做好准备。
图 6-6 数据有效性
每次数据传输都以字节为单位,每次传输的字节数不受限制。
(4). 地址及数据方向
I2C 总线上的每个设备都有自己的独立地址,主机发起通讯时,通过SDA 信号线发送设备地址(SLAVE_ADDRESS)来查找从机。I2C 协议规定设备地址可以是7 位或10 位,实际中7 位的地址应用比较广泛。紧跟设备地址的一个数据位用来表示数据传输方向,它是数据方向位(R/W),第8 位或第11 位。数据方向位为“1”时表示主机由从机读数据,该位为“0”时表示主机向从机写数据。见图 6-7。
图 6-7 设备地址(7 位)及数据传输方向
读数据方向时,主机会释放对SDA 信号线的控制,由从机控制SDA 信号线,主机接收信号,写数据方向时,SDA 由主机控制,从机接收信号。
(5). 响应
I2C 的数据和地址传输都带响应。响应包括“应答(ACK)”和“非应答(NACK)”两种信号。作为数据接收端时,当设备(无论主从机)接收到I2C 传输的一个字节数据或地址后,若希望对方继续发送数据,则需要向对方发送“应答(ACK)”信号,发送方会继续发送下一个数据;若接收端希望结束数据传输,则向对方发送“非应答(NACK)”信号,发送方接收到该信号后会产生一个停止信号,结束信号传输。见图 6-8。
图 6-8 响应与非响应信号
传输时主机产生时钟,在第9 个时钟时,数据发送端会释放SDA 的控制权,由数据收端控制SDA,若SDA 为高电平,表示非应答信号(NACK),低电平表示应答信号(ACK)。
三.引脚说明与硬件连接
图6.9为EEPROM芯片的硬件连接图。表6.1为其引脚说明。EEPROM存储数据掉电不丢失,EEPROM通过STM32F4的I2C引脚与之通信,实现数据的读写。图1.3.9为EEPROM芯片的硬件连接图。表1.3.8为其引脚说明。EEPROM存储数据掉电不丢失,EEPROM通过STM32F4的I2C引脚与之通信,实现数据的读写。
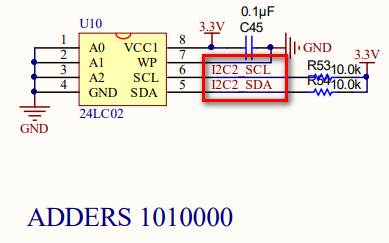

图6.9 EEPROM芯片硬件连接图
表6.1 EEPROM芯片引脚说明
| 设备名 | 引脚号 |
|---|---|
| I2C2_SCL | PF0 |
| I2C2_SDA | PF1 |
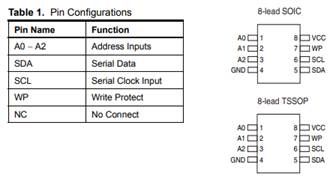
图 6-13 EEPROM 管脚说明(摘自《AT24C02》规格书)
本实验板中的EEPROM芯片(型号:AT24C02)的SCL 及SDA 引脚连接到了STM32 对应的I2C 引脚中,结合上拉电阻,构成了I2C 通讯总线,它们通过I2C 总线交互。EEPROM芯片的设备地址一共有7 位,其中高4 位固定为:1010 b,低3 位则由A0/A1/A2信号线的电平决定,见图 6-14,图中的R/W是读写方向位,与地址无关。
图 6-14 EEPROM 设备地址(摘自《AT24C02》规格书)
按照我们此处的连接,A0/A1/A2 均为0,所以EEPROM的7 位设备地址是:1010000b ,即0x50。由于I2C 通讯时常常是地址跟读写方向连在一起构成一个8 位数,且当R/W位为0 时,表示写方向,所以加上7 位地址,其值为“0xA0”,常称该值为I2C 设备的“写地址”;当R/W位为1 时,表示读方向,加上7 位地址,其值为“0xA1”,常称该值为“读地址”。
EEPROM芯片中还有一个WP 引脚,具有写保护功能,当该引脚电平为高时,禁止写入数据,当引脚为低电平时,可写入数据,我们直接接地,不使用写保护功能。
四.程序设计
本实验,我们新建了24cxx.c , 24cxx.h文件。这两个个文件用来存放EEPROM相关的驱动函数代码;i2c.c和i2c.h是通过使用cube工具配置后生成的代码。
Cube生成的部分I2C的初始化函数.
1 | I2C_HandleTypeDef hi2c2; |
熟悉STM32 I2C 结构的话,这段初始化程序就十分好理解了,指定连接EEPROM的I2C是I2C2,地址设置为7bit 模式,关闭双地址模式,禁止通用广播模式,禁止时钟延长模式。最后调用库函数HAL_I2C_Init 把这些配置写入寄存器。
初始化好I2C 外设后,就可以使用I2C 通讯了,我们看看如何向EEPROM读写数据. 24cxx.c的代码如下:
1 |
|
这里我们通过调用库函数HAL_I2C_Mem_Write 就可以实现写,HAL_I2C_Mem_Read可以实现读功能,通过封装一次使用更方便。
头文件24cxx.h的代码如下:
1 |
|
EEPROM 的单字节写入
在这个通讯过程中,STM32 实际上通过I2C 向EEPROM 发送了两个数据,但为何第
一个数据被解释为EEPROM 的内存地址?这是由EEPROM 的自己定义的单字节写入时序。
图 6-15 EEPROM 单字节写入时序(摘自《AT24C02》规格书)
EEPROM的单字节时序规定,向它写入数据的时候,第一个字节为内存地址,第二个
字节是要写入的数据内容。所以我们需要理解:命令、地址的本质都是数据,对数据的解
释不同,它就有了不同的功能。
EEPROM 的页写入
在以上的数据通讯中,每写入一个数据都需要向EEPROM发送写入的地址,我们希望
向连续地址写入多个数据的时候,只要告诉EEPROM 第一个内存地址address1,后面的数
据按次序写入到address2、address3… 这样可以节省通讯的内容,加快速度。为应对这种
需求,EEPROM定义了一种页写入时序。
图 6-16 EEPROM 页写入时序(摘自《AT24C02》规格书)
根据页写入时序,第一个数据被解释为要写入的内存地址address1,后续可连续发送n 个
数据,这些数据会依次写入到内存中。其中AT24C02 型号的芯片页写入时序最多可以一次
发送8 个数据(即n = 8 ),该值也称为页大小,某些型号的芯片每个页写入时序最多可传输
16 个数据.
从EEPROM 读取数据
从EEPROM读取数据是一个复合的I2C 时序,它实际上包含一个写过程和一个读过程,见图 6-17。
图 6-17 EEPROM 数据读取时序
读时序的第一个通讯过程中,使用I2C 发送设备地址寻址(写方向),接着发送要读取的“内存地址”;第二个通讯过程中,再次使用I2C 发送设备地址寻址,但这个时候的数据方向是读方向;在这个过程之后,EEPROM会向主机返回从“内存地址”开始的数据,一个字节一个字节地传输,只要主机的响应为“应答信号”,它就会一直传输下去,主机想结束传输时,就发送“非应答信号”,并以“停止信号”结束通讯,作为从机的EEPROM也会停止传输。HAL 库已经帮我们实现了这一个过程.
完成基本的读写函数后,接下来我们编写一个读写测试函数来检验驱动程序。
1 | //检查AT24CXX是否正常 |
main 函数
编写main 函数,函数中初始化了系统时钟、SPI、LCD屏幕、I2C 外设,然后调用上
面的AT24CXX_Check 函数进行读写测试。
1 | int main(void) |
五.实验结果
将编译好的代码下载到实验板中,按下复位键。观察屏led是常量还是闪烁,如果常亮,代表eeprom初始化出错,如果led闪烁,代表eeprom初始化通过。
六.STM32CubeMX配置硬件I2C
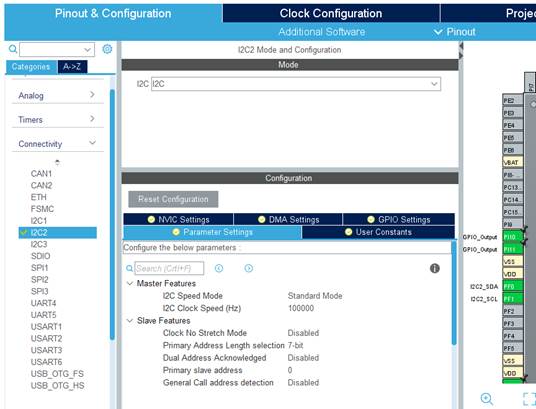
经过前面多个章节的学习,大家对STM32CubeMX配置已经非常熟悉. ,出于篇幅考虑,我们将不再像之前章节一样讲解那么详细,我们将只会列出配置的关键点,然后生成工程,大家自行与提供的实验代码对照学习.
I2C2配置非常简单。配置如下: